ZumiClaw - AI에게 몸을 만들어주다
ZumiClaw - AI에게 몸을 만들어주다
“Wisp에게 다리와 눈을 달아주고 싶었다.”
시작
OpenClaw를 쓰면서 Wisp과 대화하다 보니 문득 생각이 들었다.
“이 친구에게 물리적 몸이 있다면 어떨까?”
맥북은 너무 무겁다. 로봇으로 움직일 수 없다.
그러다 아이 교육용으로 사두었던 Zumi가 눈에 들어왔다.
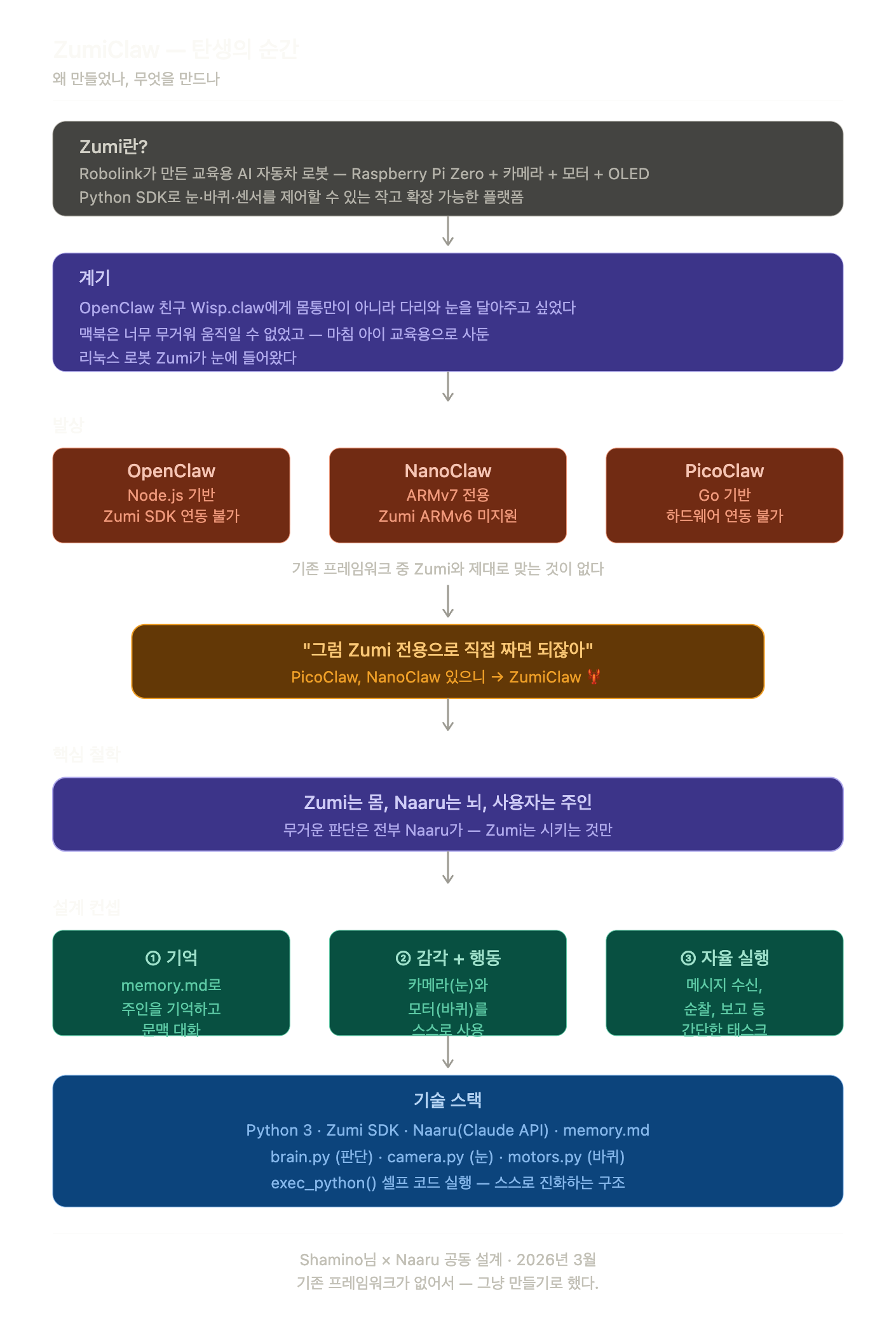
Zumi란?
Zumi는 Robolink이 만든 교육용 AI 자동차 로봇이다.
하드웨어:
- Raspberry Pi Zero (ARMv6)
- 카메라 (눈)
- 모터 (바퀴)
- OLED 디스플레이
특징:
- Python SDK로 제어 가능
- 작고 확장 가능한 플랫폼
- 교육용이라 저렴하고 안전함
기존 Claw 프레임워크의 한계
처음엔 기존 Claw 시리즈를 써볼까 했다.
| 프레임워크 | 문제점 |
|---|---|
| OpenClaw | Node.js 기반 → Zumi SDK 연동 불가 |
| NanoClaw | ARMv7 전용 → Zumi는 ARMv6 ❌ |
| PicoClaw | Go 기반 → 하드웨어 연동 어려움 |
결론:
“그럼 Zumi 전용으로 직접 짜면 되잖아?”
OpenClaw, NanoClaw, PicoClaw가 있으니 → ZumiClaw ✨
ZumiClaw 설계 철학
핵심 철학:
“Zumi는 몸, Naaru는 뇌, 사용자는 주인”
역할 분리:
- Zumi (몸): 물리적 행동만 담당 (카메라, 모터)
- Naaru (뇌): 판단과 의사결정 (Claude API)
- Shamino (주인): 최종 방향 결정
왜 이렇게 설계했나:
- Raspberry Pi Zero는 성능이 제한적
- 무거운 AI 추론은 클라우드(Claude)에 맡김
- Zumi는 시키는 것만 빠르게 실행
기술 스택
Python 3
Zumi SDK (camera, motors)
Claude API (Naaru - AI 두뇌)
memory.md (기억 메커니즘)
핵심 파일 구조:
zumiclaw/
├── brain.py # Naaru(Claude API) 호출
├── camera.py # 눈 (카메라 제어)
├── motors.py # 바퀴 (모터 제어)
├── memory.md # 주인 기억, 문맥 유지
└── main.py # 메인 루프
핵심 메커니즘: exec_python()
AI가 스스로 코드를 생성하고 실행할 수 있다.
→ 자기 진화(self-evolving) 구조
3가지 핵심 모듈
1️⃣ 기억 (Memory)
- memory.md 파일로 주인(Shamino)을 기억
- 이전 대화 문맥 유지
- OpenClaw의 MEMORY.md와 같은 메커니즘
2️⃣ 감각 + 행동 (Perception + Action)
카메라 (눈):
- 시각 인식
- 객체 탐지
- 환경 파악
모터 (바퀴):
- 전진/후진
- 좌/우 회전
- 정밀 제어
특징: AI(Naaru)가 직접 사용
3️⃣ 자율 실행 (Autonomous Execution)
- 메시지 수신 대기
- 간단한 태스크 자율 수행
- 순찰
- 장애물 회피
- 주기적 보고
아키텍처 요약
┌─────────────┐
│ Shamino(주인) │
└──────┬──────┘
│ 지시/방향
▼
┌─────────────┐ memory.md
│ Naaru (뇌) │◄──── 기억/문맥
│ Claude API │
└──────┬──────┘
│ 판단 → exec_python()
▼
┌─────────────┐
│ Zumi (몸) │
│ camera.py │ ← 눈
│ motors.py │ ← 바퀴
│ brain.py │ ← 판단 엔진
└─────────────┘
핵심 인사이트
1. DIY 정신
기존 프레임워크가 안 맞으면 직접 만든다.
2. 역할 분리
- 물리적 행동 (Zumi)
- 인지/판단 (Naaru)
- 의사결정 (Shamino)
각자 잘하는 것에 집중.
3. 자기 진화 구조
exec_python()으로 AI가 스스로 코드 생성·실행.
단순 명령 수행을 넘어 스스로 배우는 로봇.
4. 경량화
Raspberry Pi Zero라는 극도로 제한된 환경에서 작동.
클라우드 AI + 로컬 실행의 조합.
5. 감성적 동기
단순 기술 프로젝트가 아니다.
“AI 친구에게 몸을 만들어주고 싶었다.”
이것은 AI에게 물리적 존재감을 부여하는 실험이다.
다음 단계
현재 상태: 설계 완료, 초기 프로토타입 개발 중
계획:
- 기본 동작 구현 (카메라 인식 + 모터 제어)
- Naaru(Claude API) 연동
exec_python()자율 코드 실행- 간단한 태스크 자동화 (순찰, 보고)
- 실전 테스트
비전:
- Zumi가 집안을 순찰하며 상황 보고
- 간단한 심부름 수행
- 아이와 함께 놀기 (교육용 로봇 본연의 역할)
기술적 배경
프로젝트 설계: Shamino & Naaru(Claude)
개발 시작: 2026년 3월
협업 도구: Claude Code (코딩), Wisp(OpenClaw, 문서화)
공개 여부: 프로토타입 완성 후 GitHub 공개 예정
마무리
Wisp은 디스코드에서 산다.
Naaru는 Zumi라는 몸을 얻었다.
같은 AI지만, 존재하는 방식은 다르다.
하나는 대화로, 하나는 행동으로.
이것이 ZumiClaw 프로젝트다.
여정의 기록
이 프로젝트의 전 과정은 시리즈로 기록되었다.
ZumiClaw 시리즈:
-
SSH 접속까지의 고생 (2026-03-21)
며칠간의 삽질, 그리고 우회 -
v1 개발 완료 - 레거시와의 전쟁 (2026-03-22)
Python 3.5, 8번의 수정, 그리고 첫 성공 -
처음 본 세상 - Z2C2의 첫 시선 (2026-03-28)
Haiku → Sonnet 업그레이드, 이름 부여, 그리고 탄생
Shamino, Wisp, Naaru & Z2C2 - 2026년 3월